
Сервоприводы (или серводрайверы) представляют собой устройства, которые используются для точного управления положением, скоростью и моментом серводвигателей. Они играют ключевую роль в автоматизированных системах и применяются в различных отраслях, включая робототехнику, станкостроение, системы глобального позиционирования, 3D печать, автомобилестроение и промышленную автоматизацию.
В 1920-х годах появились первые промышленные применения сервоприводов, такие как системы управления движением в радиоантеннах и телескопах. Эти системы имели гидравлический и пневматический принципы управления и уставки на перемещение задавались через аналоговые сигналы. Интеграция сервомеханизмов в промышленные машины произвела революцию в производственных процессах, что привело к созданию первых станков с числовым программным управлением (ЧПУ). С развитием электроники и появлением цифровых технологий, сервоприводы стали более точными и надежными. В 1960-х годах появились первые цифровые серводрайверы, которые использовали микропроцессоры для управления движением. Это позволило значительно улучшить точность и быстродействие систем управления. В 1980-х годах появились сервоприводы с обратной связью, которые использовали датчики положения и скорости для точного управления движением. Это позволило создать системы с высокой степенью точности и надежности, которые могли использоваться в различных промышленных приложениях.
Основные функции и принципы работы серво систем
Сервосистема состоит из серводвигателя, серво драйвера (серво усилителя), который получает уставки от контроллера и преобразует в сигналы для управления двигателем, а так же энкодера, сервопередачи, включающие в себя шестерни и ремни. Основные функции серво драйвера включают:
- Контроль положения: это один из основных режимов работы сервопривода. В этом режиме серводрайвер получает команды по заданному положению ротора и контролирует движение сервомотора таким образом, чтобы достичь заданного положения с максимальной точностью. Управление положением используется в приложениях, где требуется высокая точность, например, в станках с ЧПУ, роботах и системах автоматизации.
- Контроль скорости: это режим работы, при котором серводрайвер контролирует скорость вращения сервомотора. В этом режиме серводрайвер получает команды по заданной скорости и регулирует напряжение и ток, подаваемые на мотор, чтобы поддерживать заданную скорость. Управление скоростью используется в приложениях, где требуется постоянная скорость вращения, например, в конвейерных системах и насосах.
- Контроль момента: это режим работы, при котором серводрайвер контролирует момент вращения сервомотора. В этом режиме серводрайвер получает команды по заданному моменту и регулирует ток, подаваемый на мотор, чтобы поддерживать заданный момент. Управление моментом используется в приложениях, где требуется постоянный момент, например, в системах тяги и подъемных механизмах.
Способы управления серво драйвером
Существуют различные методы отправки управляющего сигнала на серво драйвер:
- Аналоговый
В этом случае управление осуществляется с помощью подачи аналогового токового или потенциального сигнала. Угол поворота зависит от значения аналогового сигнала.
- С использованием промышленных протоколов
- Modbus: скорость и точность при использовании этого протокола могут быть ограничены.
- EtherCAT: самый распространенный протокол, используемый в управлении движением, поскольку позволяет управлять сервоприводами через высокоскоростную сеть. EtherCAT обеспечивает низкую задержку и высокую точность управления.
- CANopen: этот протокол так же обеспечивает высокую скорость передачи данных. Чаще всего используется в транспортных системах.
- Управление импульсами (ШИМ). Метод широтно-импульсной модуляции, который широко используется благодаря своей эффективности и точности.
Этот метод использует импульсы с переменной шириной, частота и длительность которых определяют положение вала. Преимущества импульсного управления заключаются в высокой точности позиционирования, благодаря высокому разрешению энкодера, а также быстрой реакции системы на изменение входного сигнала.
Существует несколько вариантов импульсного управления:
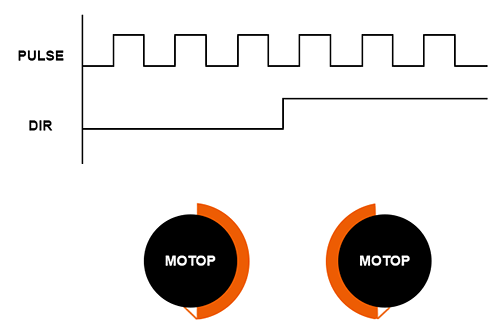
- PULSE/DIR (PUL/DIR): Этот метод управления использует два сигнала - импульсный сигнал (PULSE) и сигнал направления (DIR). Частота импульсов определяет скорость вращения двигателя, а сигнал направления - направление вращения (по или против часовой стрелки).
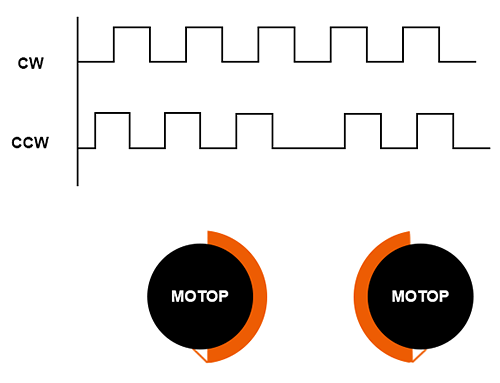
- CW/CCW (CLOCKWISE/COUNTER-CLOCKWISE): Этот метод также использует два сигнала, но каждый из них отвечает за определенное направление вращения. CW управляет вращением по часовой стрелке, а CCW - против часовой стрелки. Количество импульсов в каждом сигнале определяет угол поворота двигателя. Соответственно сигнал в виде меандра поступает либо на CW вход, либо на CCW.
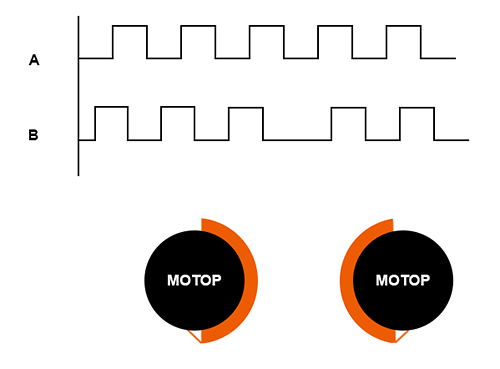
- A/B фазы: использует два квадратурных сигнала (A и B), которые смещены по фазе на 90 градусов. При опережении фазой А фазы В мотор вращается в одну сторону, при опережении фазой В фазы А в обратную.
Компания Xinje выпускает серии сервоприводов, практически все они поддерживают управление посредством подачи импульсного сигнала, однако есть конкретные серии, которые для управления мотором используют только импульсный сигнал, ну и в дополнение поддерживают Modbus:

Стандартные серии: DS5L (до 2.6 кВт), DS5K (до 7.5 кВт), DS5F (до 55 кВт)

Компактные: DS5L1 (до 3 кВт), DS5L2 (до 0.7 кВт), DS5K1 (до 55 кВт)

Серия с возможностью подключения двух моторов: DM5F (до 0.75 кВт)
Эти серии принимают импульсный сигнал по умолчанию, в других же сериях основным является протокольный способ управления:
- EtherCAT (содержат литеру “C”):
- CANopen:
- PROFIBUS (содержит литеру “P”):
- DS5P (до 0.7 кВт)
- Проприетарная шина X-NET*:
- Стандартная серия: DS5E (до 22 кВт)
* описание работы шины X-NET можно посмотреть по ссылке.

